End-to-End Sim-to-Real Solution for Unitree G1 | Robotics Workflow
The robotics industry is advancing at a breakneck pace, and humanoid robots like the Unitree G1 are at the forefront of this revolution. However, for engineering teams and research labs, teaching a robot to move like a human remains a monumental challenge. The “Sim-to-Real” gap—the discrepancy between simulated training environments and physical real-world execution—often leads to months of delayed timelines, inflated R&D budgets, and immense engineering frustration.
Traditionally, translating human motion capture data into deployable robotic commands requires patching together fragmented tools. You need hardware to capture the data, software to clean it, and complex algorithms to train the robot.
To solve this industry-wide bottleneck, we are thrilled to introduce our comprehensive “From Human Motion to Robot Deployment – Sim to Real Solution Package.“ This all-in-one ecosystem empowers your team to independently manage the entire pipeline—from live actor capture to the physical deployment of the Unitree G1 robot—drastically reducing your time-to-market and operational costs.
The Bottleneck in Humanoid Robot Training
Before diving into the solution, it is crucial to understand why training humanoid robots is so difficult. The standard workflow involves three distinct phases:
- Data Collection: Capturing high-quality human motion data usually requires expensive, space-consuming optical motion capture studios.
- Data Retargeting: Human joints and robotic joints are fundamentally different. Raw human data must be meticulously translated (retargeted) to fit the robot’s specific kinematic chain.
- Reinforcement Learning (RL) & Deployment: Training an RL policy in a simulation environment is only half the battle. Deploying that policy onto physical hardware without the robot losing balance or behaving erratically is the ultimate hurdle.
When teams use disjointed tools for these three phases, compatibility issues arise, leading to corrupted data and failed real-world deployments. Our solution eliminates these friction points by providing a unified, end-to-end pipeline.
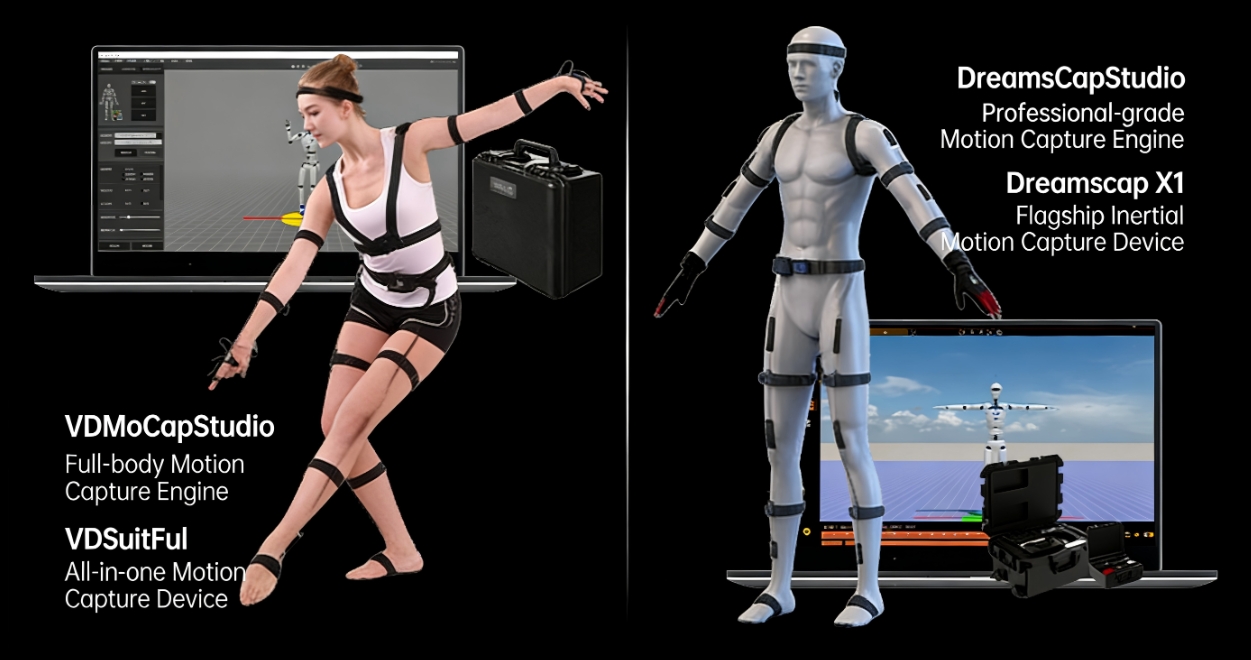
Phase 1: High-Fidelity Motion Capture with VDSuit Full & DreamsCap X1-R
The foundation of any successful robot motion imitation project is pristine data. Our solution package begins with industry-leading inertial motion capture hardware: the VDSuit Full and the DreamsCap X1-R.
Unlike traditional optical systems that require dedicated studio spaces, multiple cameras, and controlled lighting, our inertial mocap suits can be used anywhere. They accurately record complex human movements in real-time with ultra-low latency. Whether you are capturing highly dynamic upper-body tasks or complex full-body locomotion, the DreamsCap X1-R ensures a reliable, high-precision data foundation. This allows your engineers to capture natural human kinematics seamlessly, feeding high-quality raw data directly into the next stage of the pipeline.
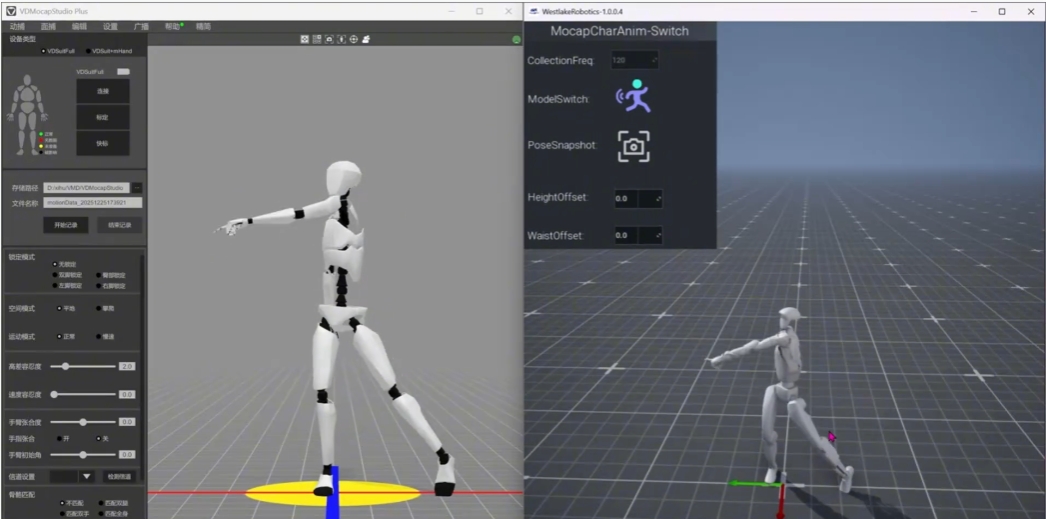
Phase 2: Seamless Data Retargeting with VDRobot Studio
Raw human motion data cannot be fed directly into a robot. A human’s range of motion, center of mass, and joint limits differ vastly from those of the Unitree G1. This is where VDRobot Studio comes in.
VDRobot Studio is our specialized motion data retargeting and correction software. It acts as the intelligent bridge between human kinematics and robotic mechanics. Within a unified interface, engineers can clean, edit, and retarget human motion data directly onto the Unitree G1’s kinematic model.
The software features built-in Inverse Kinematics (IK) and Forward Kinematics (FK) correction, automatic foot-skate removal, and physical limit verification. By using VDRobot Studio, you guarantee that the motions are physically achievable by the Unitree G1 before you spend expensive computational hours on reinforcement learning.
Phase 3: The Sim-to-Real Reinforcement Learning Toolkit
The final and most critical phase is turning that refined motion data into intelligent, autonomous robotic behavior. Our Robotics Data RL Resource Toolkit provides the open-source Python architecture necessary to make the final leap from simulation to reality.
This comprehensive toolkit includes:
- Reinforcement Learning Training: Pre-configured scripts and environments to train robust control policies using your custom motion datasets.
- Simulation Environment Deployment: Safe, physics-based simulation setups (such as Isaac Gym or MuJoCo) to rigorously test and validate the trained models.
- Real-World Hardware Deployment: The exact scripts and parameter configurations needed to transfer your validated models directly to the physical Unitree G1 hardware.
Because the source code is fully accessible, your team has total control over the training parameters, allowing for deep customization and advanced AI research.
Why Choose the Sim-to-Real Solution Package?
By investing in this comprehensive package, research labs and enterprise R&D teams unlock massive advantages:
- 100% Autonomy: Stop relying on third-party data processing services. Bring the entire workflow in-house.
- Massive Cost & Time Savings: Bypass the months of trial-and-error typically required to build a pipeline from scratch. Our out-of-the-box compatibility means your team can start training on day one.
- Accelerated Innovation: By streamlining the tedious data translation and deployment steps, your engineers can focus on what truly matters: developing advanced AI algorithms and pushing the boundaries of humanoid robotics.
Transform Human Intent into Robotic Reality
The future of robotics relies on bridging the gap between human intelligence and mechanical execution. With the From Human Motion to Robot Deployment – Sim to Real Solution Package, you have the ultimate toolkit to make that happen.
Ready to accelerate your Unitree G1 development pipeline? Contact our team today to schedule a live demo and see how our end-to-end workflow can revolutionize your robotics R&D.